Dataset Overview
Overview of the dacapo_toolbox.iterable_dataset helper function
The iterable_dataset function is a powerful helper function that wraps around gunpowder and funlib libraries to provide a simple and powerful entrypoint for creating torch datasets. It’s main features are:
Properly handling spatial augmentations such as mirroring, transposing, elastic deformations, rotations and image scaling while handling any necessary context without excess padding or data reads. (This is a gunpowder feature) See the gunpowder docs for more details.
Robust sampling of input data using a variety of sampling strategies such as sampling from a set of points, guaranteeing a certain amount of masked in data, or sampling uniformly from the input data. (This is also achieved using gunpowder)
Creates a simple torch dataset interface that can be used with any pytorch parallelization scheme such as
torch.utils.data.DataLoader.Can handle both arrays and graphs as input and output data.
Can handle arbitrary number of dimensions, easily generalizing to 3D plus time.
[1]:
# ## A simple dataset
from dacapo_toolbox.dataset import iterable_dataset
from funlib.persistence import Array
from skimage.data import astronaut
import matplotlib.pyplot as plt
from pathlib import Path
out_ds = Path("_static/dataset_overview")
if not out_ds.exists():
out_ds.mkdir(parents=True)
/home/runner/work/dacapo-toolbox/dacapo-toolbox/.venv/lib/python3.11/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
[2]:
dataset = iterable_dataset(
{"astronaut": Array(astronaut().transpose((2, 0, 1)), voxel_size=(1, 1))},
shapes={"astronaut": (256, 256)},
)
batch_gen = iter(dataset)
[3]:
sample = next(batch_gen)
plt.imshow(sample["astronaut"].numpy().transpose((1, 2, 0)))
plt.show()
[4]:
sample = next(batch_gen)
plt.imshow(sample["astronaut"].numpy().transpose((1, 2, 0)))
plt.show()
You may notice a couple things about the above images.
First why are we transposing and adding a voxel size? Gunpowder expects channel dimensions to come before spatial dimensions, and the voxel size defines the number of spatial channels. Allowing for a voxel size lets us handle arrays of different resolutions and makes sure we can handle any non-isotropic data gracefully.
Second we see some padding at the side. This is because we treat every array given to us as an infinite array padded with zeros, and by default only guarantee that the center pixel is sampled from within the provided array. You can adjust this with the trim term.
[5]:
dataset = iterable_dataset(
{"astronaut": Array(astronaut().transpose((2, 0, 1)), voxel_size=(1, 1))},
shapes={"astronaut": (256, 256)},
trim=(128, 128),
)
batch_gen = iter(dataset)
[6]:
sample = next(batch_gen)
plt.imshow(sample["astronaut"].numpy().transpose((1, 2, 0)))
plt.show()
[7]:
sample = next(batch_gen)
plt.imshow(sample["astronaut"].numpy().transpose((1, 2, 0)))
plt.show()
Now since we trim, we make sure we only choose samples where the center pixel is at least trim pixels away from the edge of the image. This guarantees that we don’t get samples with padding, but this may lead to errors if your training data is smaller than 2*trim
Next lets add more arrays. Maybe you have multiple datasets, and multiple arrays per dataset.
[ ]:
[8]:
from skimage.data import coffee
astronaut_data = astronaut().transpose((2, 0, 1)) / 255
coffee_data = coffee().transpose((2, 0, 1)) / 255
dataset = iterable_dataset(
{
"image": [
Array(astronaut_data, voxel_size=(1, 1)),
Array(coffee_data, voxel_size=(1, 1)),
],
"mask": [
Array(
astronaut_data[0] > (astronaut_data[1] + astronaut_data[2])
), # mask in red regions
Array(
coffee_data[0] > (coffee_data[1] + coffee_data[2])
), # mask in red regions
],
},
shapes={"image": (256, 256), "mask": (256, 256)},
)
batch_gen = iter(dataset)
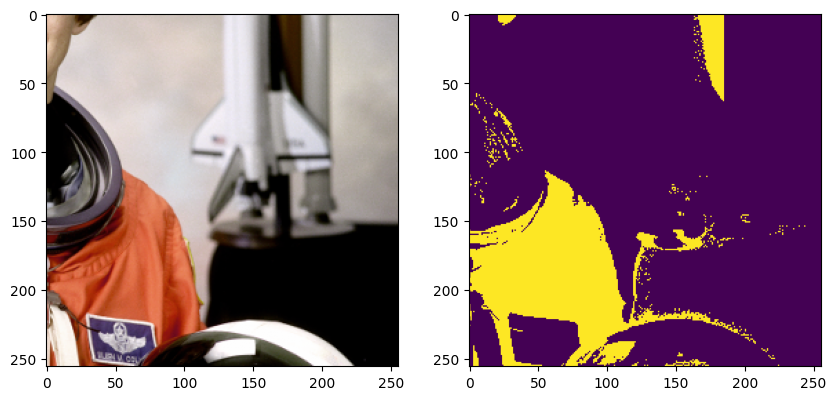
[9]:
sample = next(batch_gen)
fig, ax = plt.subplots(1, 2, figsize=(10, 5))
ax[0].imshow(sample["image"].numpy().transpose((1, 2, 0)))
ax[1].imshow(sample["mask"].numpy())
plt.show()
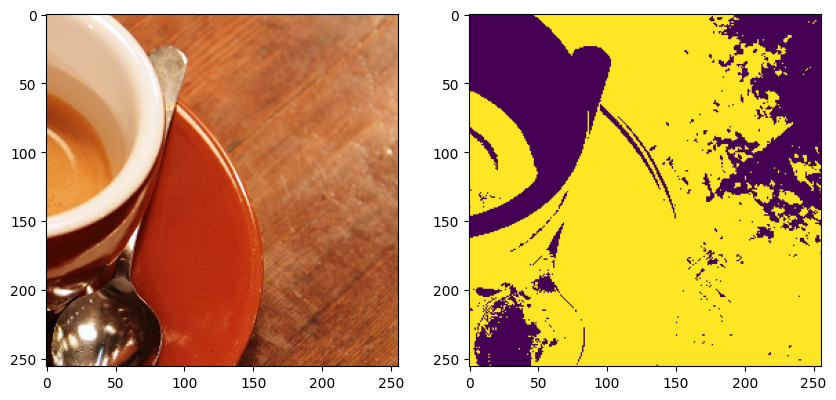
[10]:
sample = next(batch_gen)
fig, ax = plt.subplots(1, 2, figsize=(10, 5))
ax[0].imshow(sample["image"].numpy().transpose((1, 2, 0)))
ax[1].imshow(sample["mask"].numpy())
plt.show()
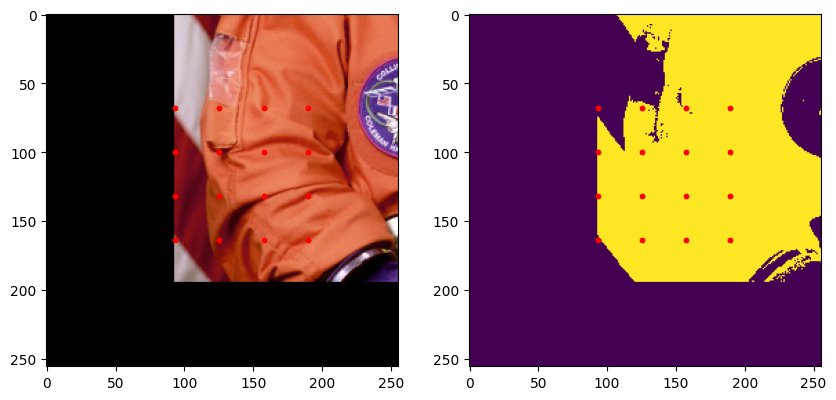
Lets add a graph to the dataset. We use the networkx library to interface with graphs. Each node in the graph must have a position attribute in world coordinates, this means accounting for the voxel size of the arrays given. In our case voxel size is (1, 1) so we can just use the pixel coordinates. We’ll use a simple grid of points as our graph.
[11]:
import networkx as nx
from itertools import product
def gen_graphs():
graphs = []
for img_data in [astronaut_data, coffee_data]:
graph = nx.Graph()
for i, j in product(
range(0, img_data.shape[1], 32), range(0, img_data.shape[2], 32)
):
graph.add_node(i * img_data.shape[2] + j, position=(i + 0.5, j + 0.5))
graphs.append(graph)
return graphs
[12]:
# Lets request the graph in a smaller region. It will be centered within the data
# we ask for.
[13]:
dataset = iterable_dataset(
{
"image": [
Array(astronaut_data, voxel_size=(1, 1)),
Array(coffee_data, voxel_size=(1, 1)),
],
"mask": [
Array(
astronaut_data[0] > (astronaut_data[1] + astronaut_data[2])
), # mask in red regions
Array(
coffee_data[0] > (coffee_data[1] + coffee_data[2])
), # mask in red regions
],
"graph": gen_graphs(),
},
shapes={"image": (256, 256), "mask": (256, 256), "graph": (128, 128)},
)
batch_gen = iter(dataset)
[14]:
import numpy as np
sample = next(batch_gen)
graph = sample["graph"]
xs = np.array([attrs["position"][0] for attrs in graph.nodes.values()])
ys = np.array([attrs["position"][1] for attrs in graph.nodes.values()])
fig, ax = plt.subplots(1, 2, figsize=(10, 5))
ax[0].imshow(sample["image"].numpy().transpose((1, 2, 0)))
ax[0].scatter(ys, xs, c="red", s=10)
ax[1].imshow(sample["mask"].numpy())
ax[1].scatter(ys, xs, c="red", s=10)
plt.show()
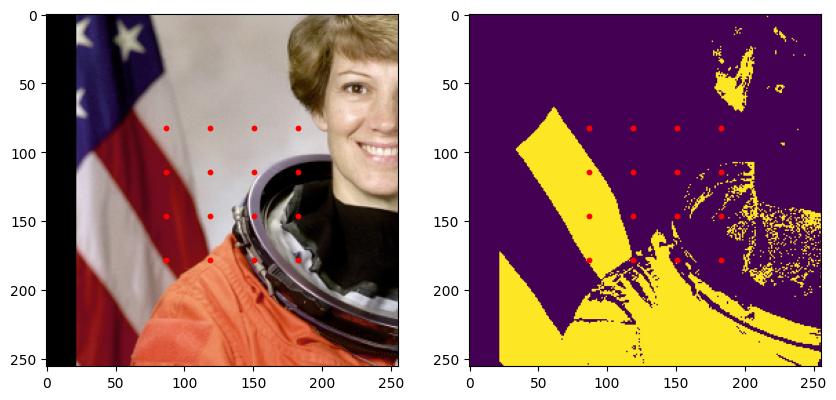
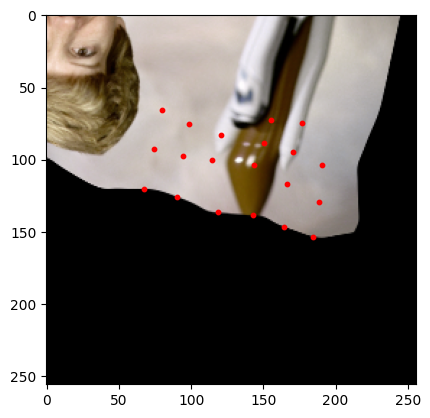
[15]:
sample = next(batch_gen)
graph = sample["graph"]
xs = np.array([attrs["position"][0] for attrs in graph.nodes.values()])
ys = np.array([attrs["position"][1] for attrs in graph.nodes.values()])
fig, ax = plt.subplots(1, 2, figsize=(10, 5))
ax[0].imshow(sample["image"].numpy().transpose((1, 2, 0)))
ax[0].scatter(ys, xs, c="red", s=10)
ax[1].imshow(sample["mask"].numpy())
ax[1].scatter(ys, xs, c="red", s=10)
plt.show()
Augmentations/Transformations
We almost always want to transform our data in some way. The iterable_dataset differentiates between two types of transformations:
Spatial augmentations: These are augmentations that change the spatial properties of the data. For example, mirroring, transposing, elastic deformations.
Non-spatial augmentations: These are augmentations that operate on the image content itself. For example, adding noise, changing brightness, binarizing, etc.
Spatial augmentations
We take two config classes that parameterize the spatial augmentations we support. DeformAugmentConfig, and SimpleAugmentConfig.
The
DeformAugmentConfighandles continuous transforms requiring interpolation. This includes rotation, scaling and elastically deforming.The
SimpleAugmentConfighandles discrete transforms that don’t require interpolation. This includes mirroring and transposing.
[16]:
from dacapo_toolbox.dataset import DeformAugmentConfig, SimpleAugmentConfig
dataset = iterable_dataset(
{
"image": [
Array(astronaut_data, voxel_size=(1, 1)),
Array(coffee_data, voxel_size=(1, 1)),
],
"graph": gen_graphs(),
},
shapes={"image": (256, 256), "graph": (128, 128)},
simple_augment_config=SimpleAugmentConfig(p=1.0, mirror_only=[1]),
deform_augment_config=DeformAugmentConfig(
p=1.0,
control_point_spacing=(8, 8),
jitter_sigma=(8.0, 8.0),
scale_interval=(0.5, 2.0),
rotate=True,
),
)
batch_gen = iter(dataset)
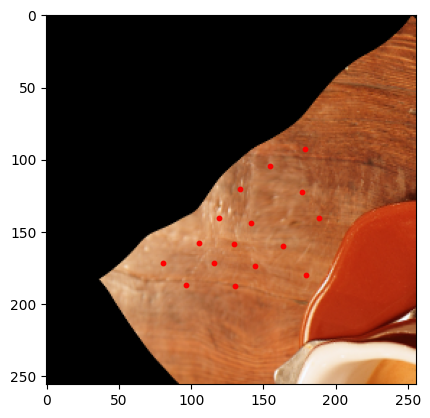
[17]:
sample = next(batch_gen)
graph = sample["graph"]
xs = np.array([attrs["position"][0] for attrs in graph.nodes.values()])
ys = np.array([attrs["position"][1] for attrs in graph.nodes.values()])
plt.imshow(sample["image"].numpy().transpose((1, 2, 0)))
plt.scatter(ys, xs, c="red", s=10)
plt.show()
/home/runner/work/dacapo-toolbox/dacapo-toolbox/.venv/lib/python3.11/site-packages/scipy/ndimage/_measurements.py:1550: RuntimeWarning: invalid value encountered in divide
results = [sum_labels(input * grids[dir].astype(float), labels, index) / normalizer
[18]:
sample = next(batch_gen)
graph = sample["graph"]
xs = np.array([attrs["position"][0] for attrs in graph.nodes.values()])
ys = np.array([attrs["position"][1] for attrs in graph.nodes.values()])
plt.imshow(sample["image"].numpy().transpose((1, 2, 0)))
plt.scatter(ys, xs, c="red", s=10)
plt.show()
Non-spatial augmentations
Non-spatial augmentations are handled using the transforms argument to the iterable_dataset function. This is a dictionary of tuples, where the key is a tuple of input and output keys, and the value is a callable that takes the designated inputs, and generates the designated outputs.
e.g. (("a", "b"), ("c", "d")): transform_1 means we expect transform_1 to take 2 tensors in (“a”, “b”), and produce 2 tensors (“c”, “d”).
("a", "c"): transform_2 is short hand for a transform that takes a single tensor in and outputs a single tensor.
"a": transform_3 is short hand for a transform that takes in a single tensor and produces a single tensor that should replace the input tensor.
Lets see some examples:
[19]:
from torchvision.transforms import v2 as transforms
dataset = iterable_dataset(
{
"image": [
Array(astronaut_data, voxel_size=(1, 1)),
Array(coffee_data, voxel_size=(1, 1)),
],
},
transforms={
"image": transforms.GaussianBlur(3, sigma=(2.0, 2.0)),
("image", "mask"): lambda d: d[0] > d[1] + d[2], # mask in red regions
(("mask", "image"), "masked_image"): lambda mask, image: mask * image,
},
shapes={"image": (256, 256)},
)
batch_gen = iter(dataset)
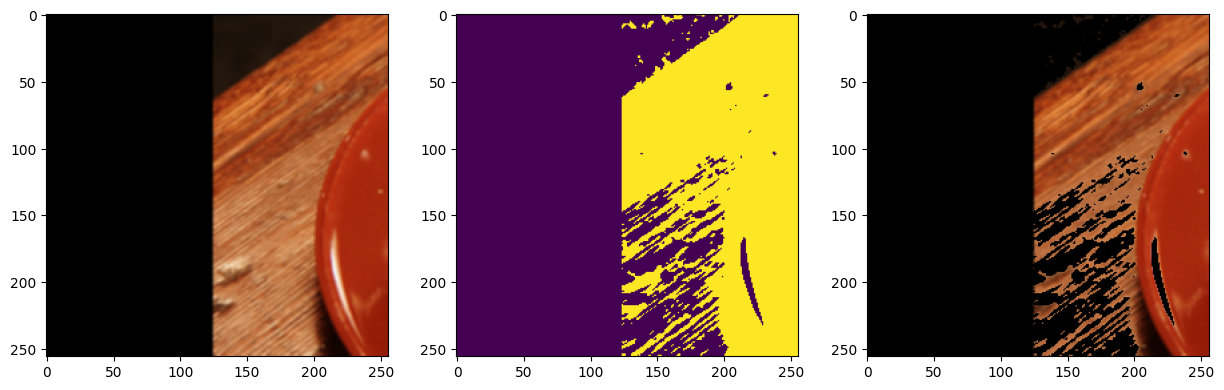
[20]:
sample = next(batch_gen)
fig, ax = plt.subplots(1, 3, figsize=(15, 5))
ax[0].imshow(sample["image"].numpy().transpose((1, 2, 0)))
ax[1].imshow(sample["mask"].numpy())
ax[2].imshow(sample["masked_image"].numpy().transpose((1, 2, 0)))
plt.show()
[21]:
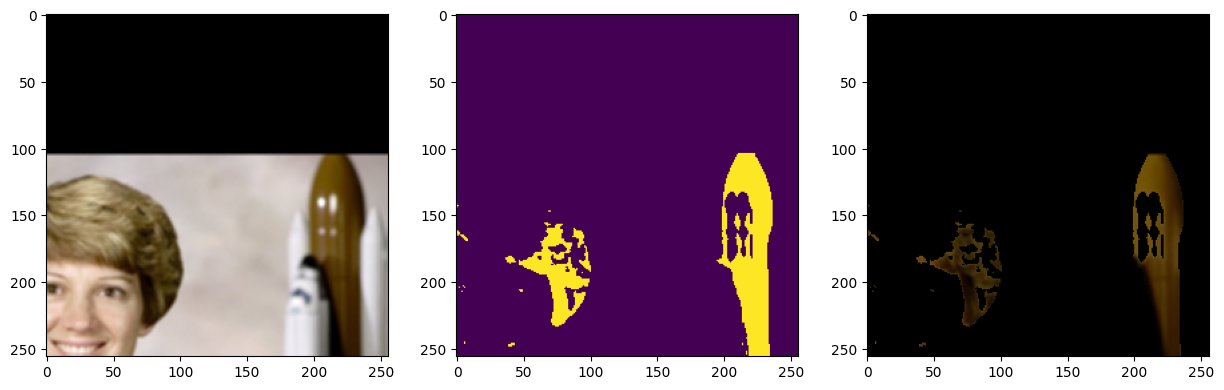
sample = next(batch_gen)
fig, ax = plt.subplots(1, 3, figsize=(15, 5))
ax[0].imshow(sample["image"].numpy().transpose((1, 2, 0)))
ax[1].imshow(sample["mask"].numpy())
ax[2].imshow(sample["masked_image"].numpy().transpose((1, 2, 0)))
plt.show()
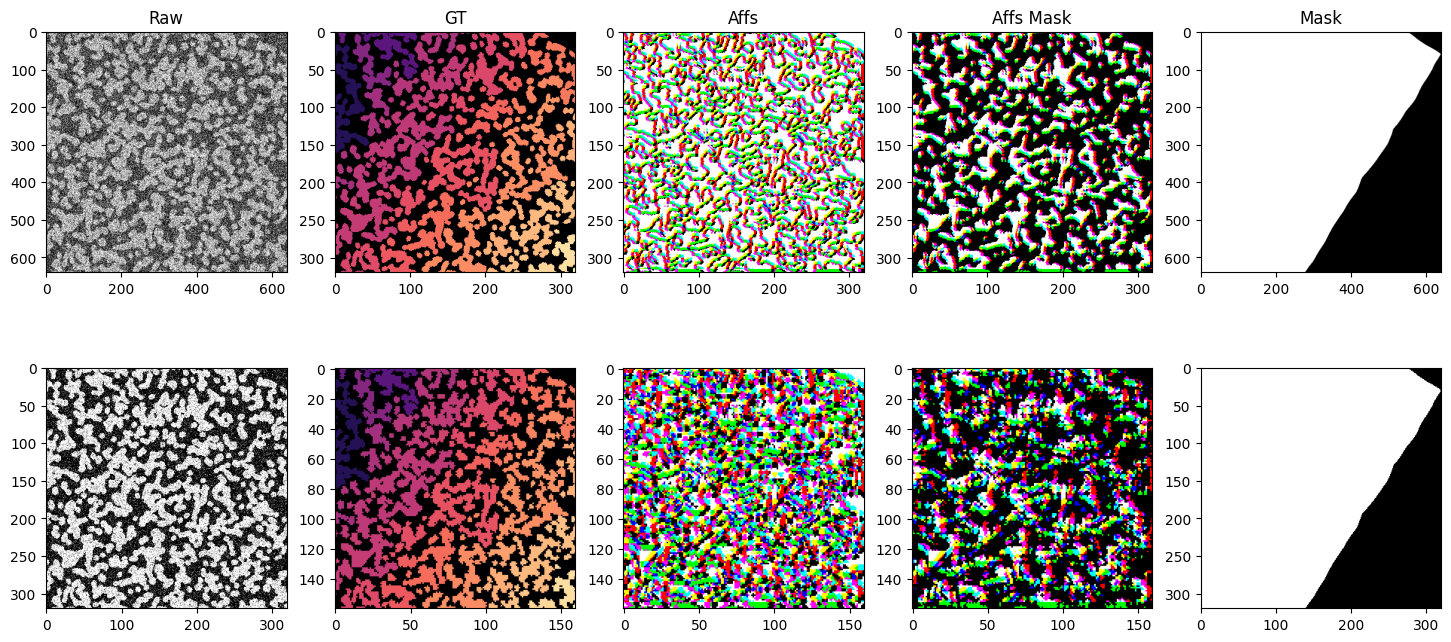
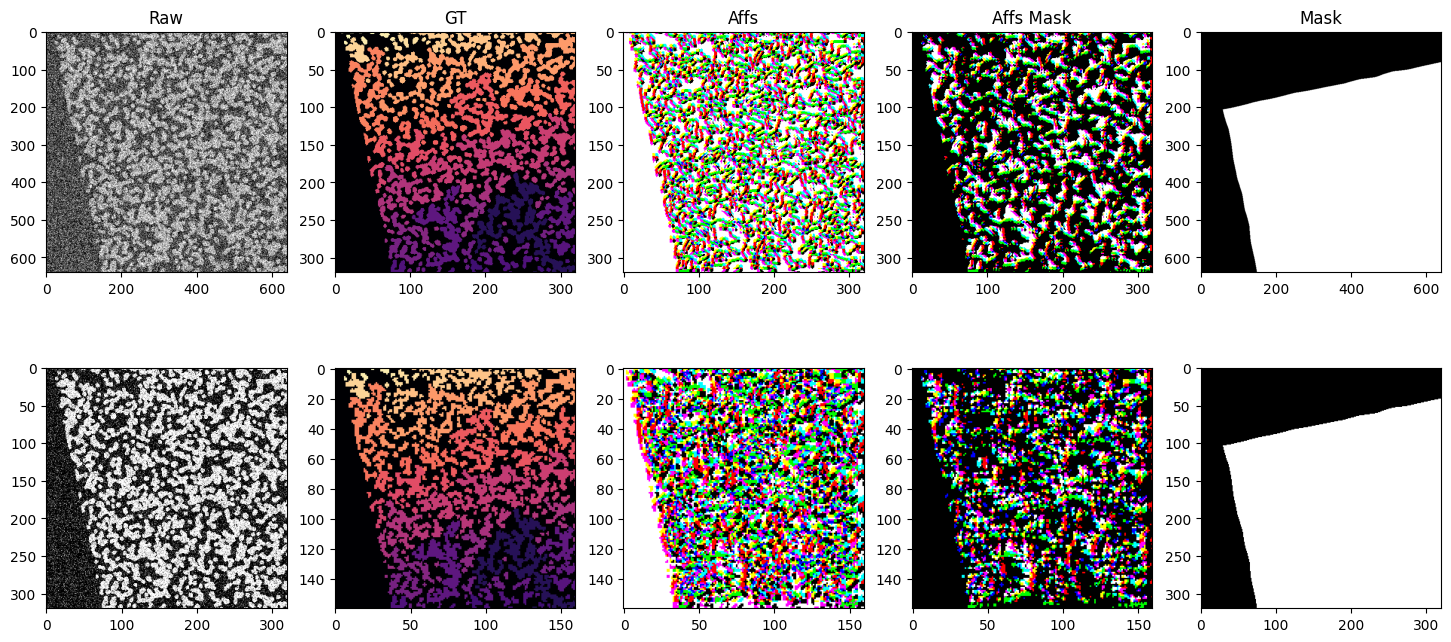
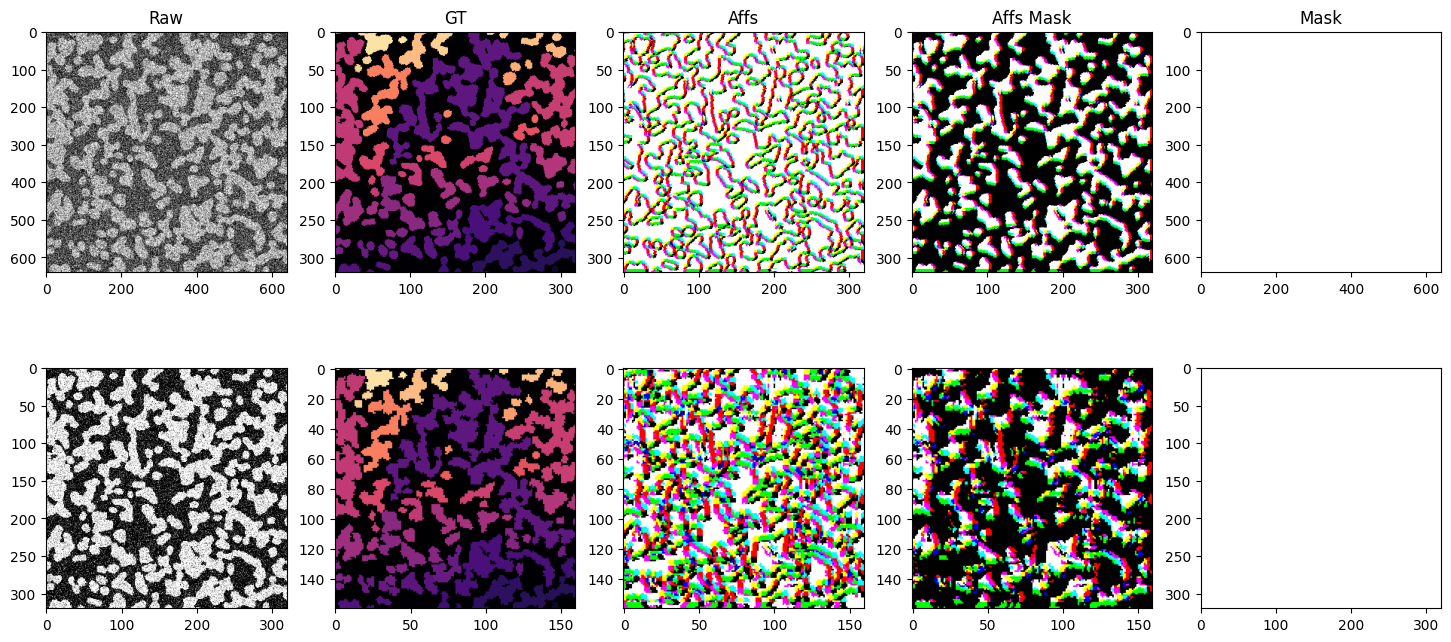
The iterable dataset is very flexible and can handle a variety of use cases. Below is a more complex example showing a dataset with multiple datasets at various resolutions, using different sampling strategies, spatial and non-spatial augmentations, and both arrays and graphs as input and output.
We generate 2 synthetic datasets with different sized blobs. blobs_a and blobs_b. We create raw and ground truth arrays in scale pyramid fashion for each dataset. blobs_a two scale levels s0 and s1 with voxel sizes (raw: (1, 1), gt: (2, 2)) and (raw: (2, 2), gt: (4, 4)) respectively. blobs_b two scale levels s0 and s1 with voxel sizes (raw: (1, 1), gt: (2, 2)) and (raw: (2, 2), gt: (4, 4)) respectively. We also create a mask for each dataset that masks out half the image. The
iterable dataset function has no problem generating samples from a variety of different voxel sizes, different sampling strategies, etc.
[22]:
from dacapo_toolbox.dataset import (
iterable_dataset,
SimpleAugmentConfig,
DeformAugmentConfig,
MaskedSampling,
PointSampling,
)
from dacapo_toolbox.transforms.affs import Affs, AffsMask
from funlib.persistence import Array
from skimage import data
from torchvision.transforms import v2 as transforms
import numpy as np
from skimage.measure import label
side_length = 2048
# two different datasets with vastly different blob sizes
blobs_a = data.binary_blobs(
length=side_length, blob_size_fraction=20 / side_length, n_dim=2
)
blobs_a_gt = label(blobs_a, connectivity=2)
blobs_b = data.binary_blobs(
length=side_length, blob_size_fraction=100 / side_length, n_dim=2
)
blobs_b_gt = label(blobs_b, connectivity=2)
mask = np.ones((side_length, side_length), dtype=bool)
mask[side_length // 2 : side_length] = 0
# raw and gt arrays at various voxel sizes
raw_a_s0 = Array(blobs_a[::1, ::1], offset=(0, 0), voxel_size=(1, 1))
raw_a_s1 = Array(blobs_a[::2, ::2], offset=(0, 0), voxel_size=(2, 2))
raw_b_s0 = Array(blobs_b[::1, ::1], offset=(0, 0), voxel_size=(2, 2))
raw_b_s1 = Array(blobs_b[::2, ::2], offset=(0, 0), voxel_size=(4, 4))
gt_a_s0 = Array(blobs_a_gt[::2, ::2], offset=(0, 0), voxel_size=(2, 2))
gt_a_s1 = Array(blobs_a_gt[::4, ::4], offset=(0, 0), voxel_size=(4, 4))
gt_b_s0 = Array(blobs_b_gt[::2, ::2], offset=(0, 0), voxel_size=(4, 4))
gt_b_s1 = Array(blobs_b_gt[::4, ::4], offset=(0, 0), voxel_size=(8, 8))
mask_a = Array(mask, offset=(0, 0), voxel_size=(1, 1))
mask_b = Array(mask, offset=(0, 0), voxel_size=(2, 2))
g = nx.Graph()
g.add_nodes_from(
[
(i, {"position": position})
for i, position in enumerate(
[
(side_length * 2 - 0.5, side_length * 2 - 0.5),
(0.5, side_length * 2 - 0.5),
(side_length * 2 - 0.5, 0.5),
(0.5, 0.5),
]
)
]
)
# defining the datasets
iter_ds = iterable_dataset(
{
"raw_s0": [raw_a_s0, raw_b_s0],
"gt_s0": [gt_a_s0, gt_b_s0],
"raw_s1": [raw_a_s1, raw_b_s1],
"gt_s1": [gt_a_s1, gt_b_s1],
"mask": [mask_a, mask_b],
"mask_dummy": [mask_a, mask_b],
"sample_points": [None, g],
},
shapes={
"raw_s0": (128 * 5, 128 * 5),
"gt_s0": (64 * 5, 64 * 5),
"raw_s1": (64 * 5, 64 * 5),
"gt_s1": (32 * 5, 32 * 5),
"mask": (128 * 5, 128 * 5),
"mask_dummy": (64 * 5, 64 * 5),
"sample_points": (128 * 5, 128 * 5),
},
sampling_strategies=[
MaskedSampling("mask_dummy", 0.8),
PointSampling("sample_points"),
],
transforms={
("raw_s0", "noisy_s0"): transforms.Compose(
[transforms.ConvertImageDtype(), transforms.GaussianNoise(sigma=1.0)]
),
("raw_s1", "noisy_s1"): transforms.Compose(
[transforms.ConvertImageDtype(), transforms.GaussianNoise(sigma=0.3)]
),
("gt_s0", "affs_s0"): Affs([[4, 0], [0, 4], [4, 4]]),
("gt_s0", "affs_mask_s0"): AffsMask([[4, 0], [0, 4], [4, 4]]),
("gt_s1", "affs_s1"): Affs([[4, 0], [0, 4], [4, 4]]),
("gt_s1", "affs_mask_s1"): AffsMask([[4, 0], [0, 4], [4, 4]]),
},
simple_augment_config=SimpleAugmentConfig(
p=1.0, mirror_probs=[1.0, 0.0], transpose_only=[]
),
deform_augment_config=DeformAugmentConfig(
p=1.0,
control_point_spacing=(10, 10),
jitter_sigma=(5.0, 5.0),
scale_interval=(0.5, 2.0),
rotate=True,
),
)
import matplotlib.pyplot as plt
for i, batch in enumerate(iter_ds):
print(f"Batch {i}")
if i >= 4: # Limit to 4 batches for demonstration
break
points = batch["sample_points"]
xs = np.array([attrs["position"][0] for attrs in points.nodes.values()])
ys = np.array([attrs["position"][1] for attrs in points.nodes.values()])
plt.scatter(xs, ys, c="red", s=10)
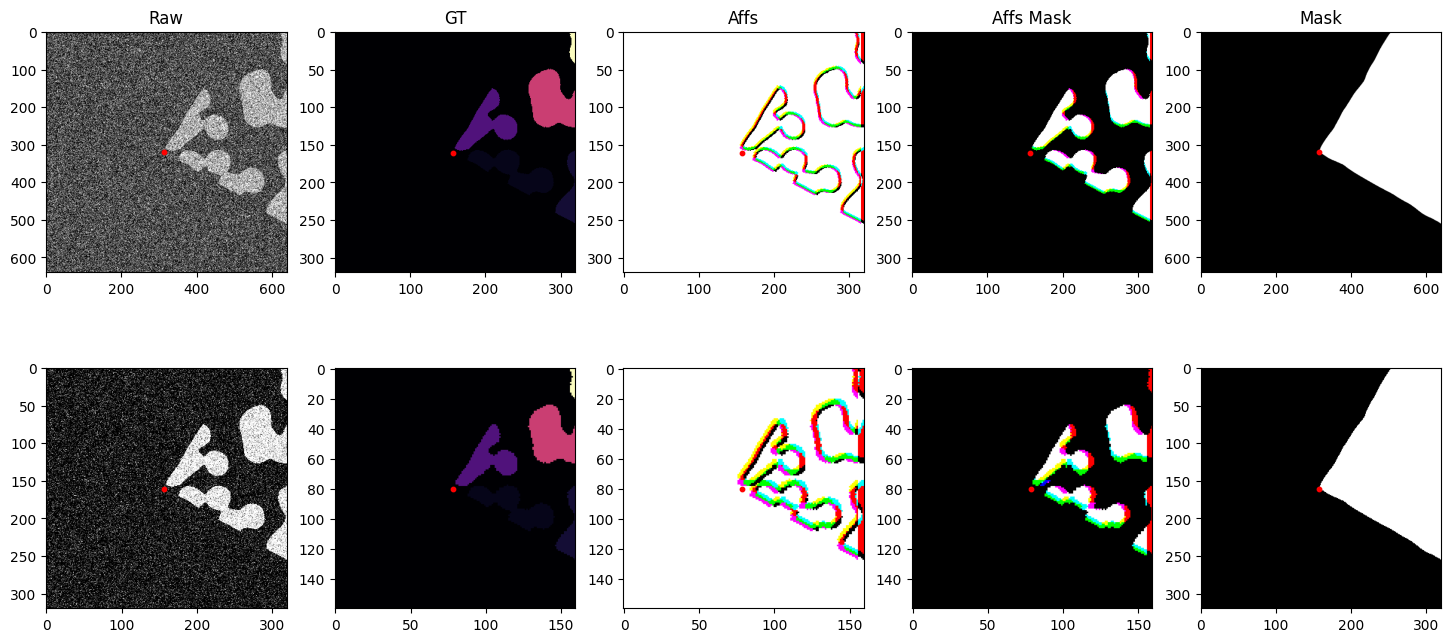
fig, axs = plt.subplots(2, 5, figsize=(18, 8))
axs[0, 0].imshow(batch["noisy_s0"], cmap="gray")
axs[0, 1].imshow(batch["gt_s0"], cmap="magma")
axs[0, 2].imshow(batch["affs_s0"].permute(1, 2, 0).float())
axs[0, 3].imshow(batch["affs_mask_s0"].permute(1, 2, 0).float())
axs[0, 4].imshow(batch["mask"].float(), vmin=0, vmax=1, cmap="gray")
axs[1, 0].imshow(batch["noisy_s1"], cmap="gray")
axs[1, 1].imshow(batch["gt_s1"], cmap="magma")
axs[1, 2].imshow(batch["affs_s1"].permute(1, 2, 0).float())
axs[1, 3].imshow(batch["affs_mask_s1"].permute(1, 2, 0).float())
axs[1, 4].imshow(batch["mask"][::2, ::2].float(), vmin=0, vmax=1, cmap="gray")
for a, b in product(range(2), range(5)):
s = 2 ** (a + (b % 4 != 0))
axs[a, b].scatter(ys / s, xs / s, c="red", s=10)
axs[0, 0].set_title("Raw")
axs[0, 1].set_title("GT")
axs[0, 2].set_title("Affs")
axs[0, 3].set_title("Affs Mask")
axs[0, 4].set_title("Mask")
plt.show()
Batch 0
/home/runner/work/dacapo-toolbox/dacapo-toolbox/.venv/lib/python3.11/site-packages/scipy/ndimage/_measurements.py:1550: RuntimeWarning: invalid value encountered in divide
results = [sum_labels(input * grids[dir].astype(float), labels, index) / normalizer
Batch 1
Batch 2
Batch 3
Batch 4